
.
อุปกรณ์ที่ใช้
8. เพาเวอร์สวิตซ์สำหรับเปิดปิด
9. รางถ่าน 18650 3 ก้อน
10 . ถ่านชาร์จ 18650 Panasonic NCR18650B 3.7v 3400mAh จำนวน 3 ก้อน
9. รางถ่าน 18650 3 ก้อน
10 . ถ่านชาร์จ 18650 Panasonic NCR18650B 3.7v 3400mAh จำนวน 3 ก้อน
11. สกรูหัวกลม+น็อตตัวเมีย ขนาด 2.6 มม. ยาว 10 มม
12. Power Bank 20000 mAh USB Output DC 5V/2.1A
เริ่มต้น ด้วย ใช้ Jumper 20cm Male to Male ผู้-ผู้ บัดกรี เข้ากับ มอเตอร์ ทั้ง 4 ตัว โดยเลือกสีของ Jumper ให้เหมือนกัน เป็นคู่ๆ เพื่อกำหนดขั้วของมอเตอร์ และ การจับคู่มอเตอร์
*** ในตัวอย่าง ****
มอเตอร์ 2 ตัวบน ใช้ Jumper สีขาว อยู่ด้านล่าง และ สีดำ อยู่ด้านบน
มอเตอร์ 2 ตัวล่าง ใช้ Jumper สีม่วง อยู่ด้านล่าง และ สีเทา อยู่ด้านบน

ประกอบมอเตอร์ 2 ตัว ด้านบน เข้ากับโครงของหุ่นยนต์ชั้นที่ 1
โดย... เชื่อมต่อสาย สีดำ จาก มอเตอร์ตัวที่ 1 ไปยัง มอเตอร์ตัวที่ 2 ที่เป็นสายสีดำเหมือนกัน และ เชื่อมต่อสาย สีขาว จาก มอเตอร์ตัวที่ 1 ไปยัง มอเตอร์ตัวที่ 2 ที่เป็นสายสีขาวเหมือนกัน

ประกอบมอเตอร์ 2 ตัว ด้านล่าง เข้ากับโครงของหุ่นยนต์ ชั้นที่1
โดย... เชื่อมต่อสาย สีเทา จาก มอเตอร์ตัวที่ 3 ไปยัง มอเตอร์ตัวที่ 4 ที่เป็นสายสีเทาเหมือนกัน และ เชื่อมต่อสาย สีม่วง จาก มอเตอร์ตัวที่ 3 ไปยัง มอเตอร์ตัวที่ 4 ที่เป็นสายสีม่วงเหมือนกัน


ยึดเสา 6 เสา สำหรับ วาง โครงหุ่นยนต์ชั้นที่ 2


การประกอบ รางถ่าน + เพาเวอร์สวิตซ์ + Motor Driver
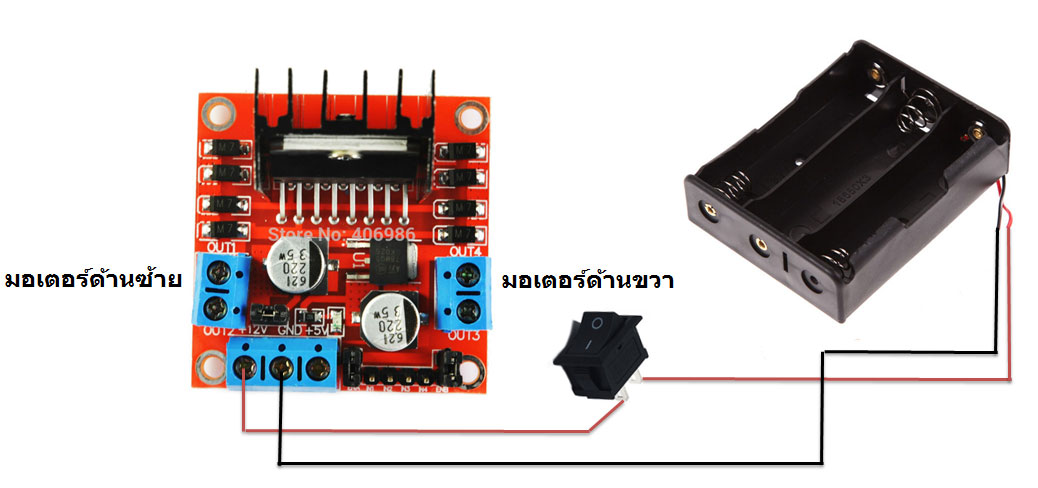
ใช้ สกรูหัวกลม+น็อตตัวเมีย ขนาด 2.6 มม. ยาว 10 มม. ยึด รางถ่าน 18650 แบบ 3 ก้อน


ใช้ จั้มเปอร์ ผู้-ผู้ ความยาว 20 เซ็นติเมตร ในตัวอย่างเป็นสายสีแดง บัดกรี เข้ากับ ขาด้านหนึ่งของ เพาเวอร์สวิตซ์สำหรับเปิด-ปิด ที่เหลือ และ บัตกรี จั้มเปอร์ ผู้-ผู้ ความยาว 20 เซ็นติเมตร ในตัวอย่างเป็นสายสีน้ำเงิน เข้ากับสายสีดำของรางถ่าน





ยึด โครงหุ่นยนต์ชั้นที่ 2 เข้า กับ โครงหุ่นยนต์ชั้นที่ 1 ที่เตรียมไว้แล้ว โดยนำสายมอเตอร์ทั้ง 2 ด้าน และ สายไฟสำหรับจ่ายไฟ ให้กับ Motor Driver ออกมาไว้ด้านบนด้วย

เชื่อมต่อไฟเข้า Motor Driver ในตัวอย่างสายสีส้มเข้าไฟ +12V และ สายสีน้ำเงินเข้า GND (เมื่อต่อเสร็จ ทดสอบเปิด เพาเวอร์สวิตซ์ จะมีไฟสีแดงติดที่ Motor Driver) แล้วจึงยึดน๊อต 6 ตัว ด้านบน



การประกอบ Motor Driver กับ GPIO ของ Raspberry Pi


ต่อสายมอเตอร์ทั้ง 2 ด้าน เข้ากับ Motor Driver ในตัวอย่างเป็นสาย สีขาวกับสายสีดำ และ สายสีม่วงกับสายสีเทา

เชื่อมต่อสายควบคุมมอเตอร์ จำนวน 4 เส้น ระหว่าง Raspberry Pi กับ Motor Driver ในตัวอย่าง เป็นสาย สีน้ำตาล-สีม่วง-สีเขียว-สีเหลือง


ภาพรวมการต่อถึงขั้นตอนนี้

ใช้ปืนยิงกาวยึด Power Bank เข้ากับตัวหุ่นยนต์ด้านล่าง

เสียบสาย USB เข้ากับ Power Bank

เสียบสาย Micro USB ของ Power Bank เข้ากับ Micro USB ของบอร์ด Raspberry Pi

ไม่มีความคิดเห็น:
แสดงความคิดเห็น